PRESA ED ASSEMBLAGGIO GUIDATI DA VISIONE
È un sistema di visione artificiale estremamente versatile poiché integra in un unico software presa del pezzo e deposito guidati dalla visione.
ACQUISIZIONE 3D
SENZA MOVIMENTAZIONE
La tecnologia di ricostruzione 3D basata sulla stereoscopia permette al sistema di ottenere informazioni sulle coordinate tridimensionali dei punti della scena, senza la necessità di movimentare né il sistema di visione, né il prodotto. La soluzione prevede il posizionamento del sensore sulla mano di presa del robot per ottenere la massima flessibilità applicativa.
LOCALIZZAZIONE
OTTIMALE FLESSIBILE
La configurazione della localizzazione di un oggetto può essere effettuata utilizzando un modello CAD oppure creando un modello a partire dall’oggetto acquisito dal sensore. Inoltre la flessibilità della localizzazione è data dal dato 3D metrico calibrato e dal matching 3D evitando così di riconfigurare il sistema di volta in volta. Più nello specifico la localizzazione 3D permette di avere pezzi in posizioni variabili rispetto al sensore a differenza di un sistema di visione 2D.
VELOCITA’ DEL SISTEMA
Il sistema è in grado di eseguire i calcoli per la localizzazione degli oggetti in parallelo alle acquisizioni ed alle attività del robot.

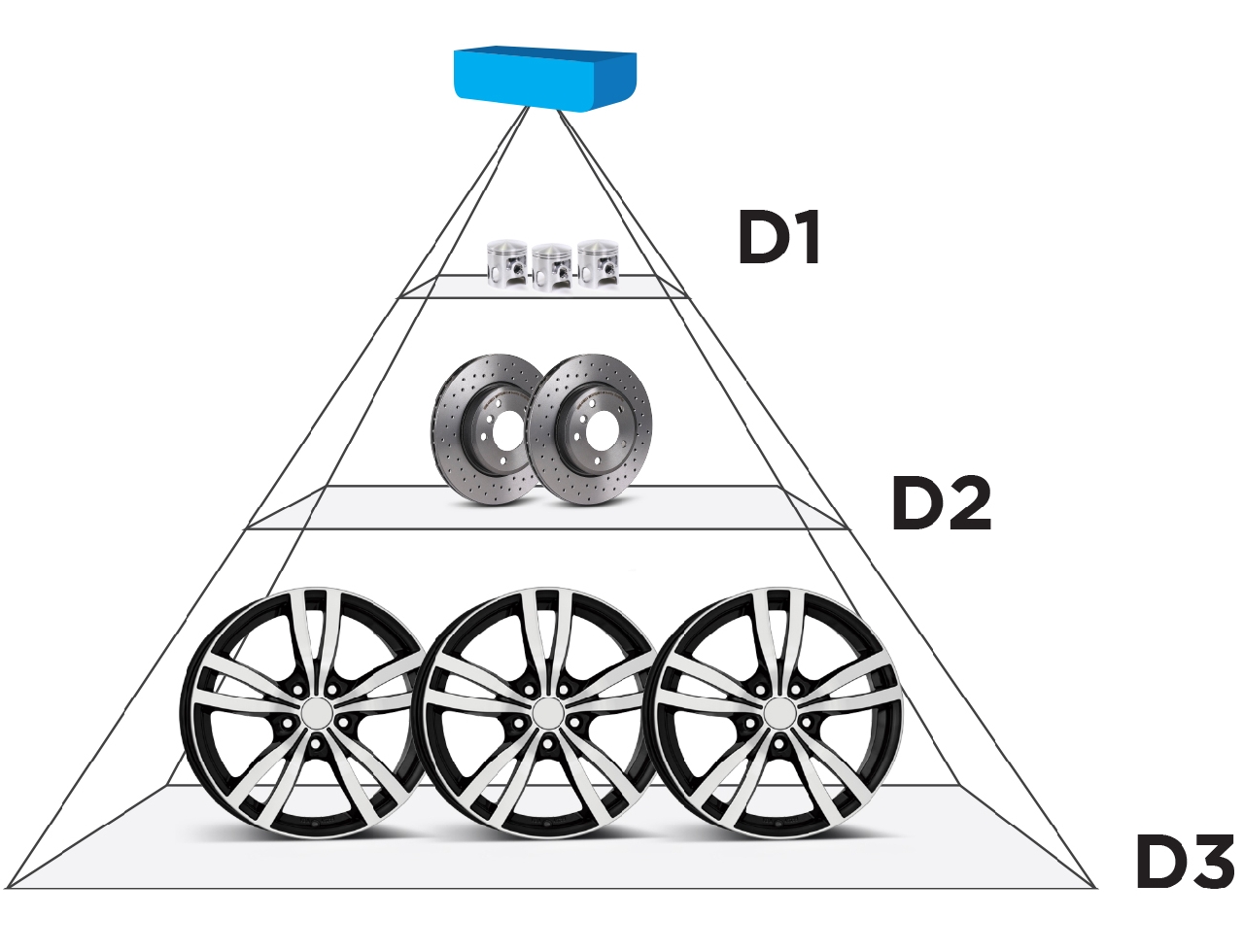
FLESSIBILITA’ NELLA GESTIONE DELL’ AREA LAVORO
A differenza di un sensore fisso questa soluzione permette di localizzare l’oggetto da acquisire anche a diverse altezze, rendendo possibile sia l’acquisizione di un singolo oggetto a distanza ridotta sia quella di un insieme di oggetti posti a maggiore distanza.
Distance 1: 328 mm
Z Resolution: 0.13 mm | X, Y Resolution: 0.31 mm | Fov: 362x321 mm
Distance 2: 500 mm
Z Resolution: 0.30 mm | X, Y Resolution: 0.48 mm | Fov: 552x490 mm
Distance 3: 800 mm
Z Resolution: 0.77 mm | X, Y Resolution: 0.77 mm | Fov: 884x784 mm
LOGICA DI PRELIEVO INTELLIGENTE & CONTROLLO COLLISIONI
Il sistema è in grado di determinare il miglior pezzo prelevabile in base alla scena e alla disposizione degli oggetti. Inoltre è versatile poiché può seguire una logica di prelievo personalizzata secondo le specifiche dell’impianto.
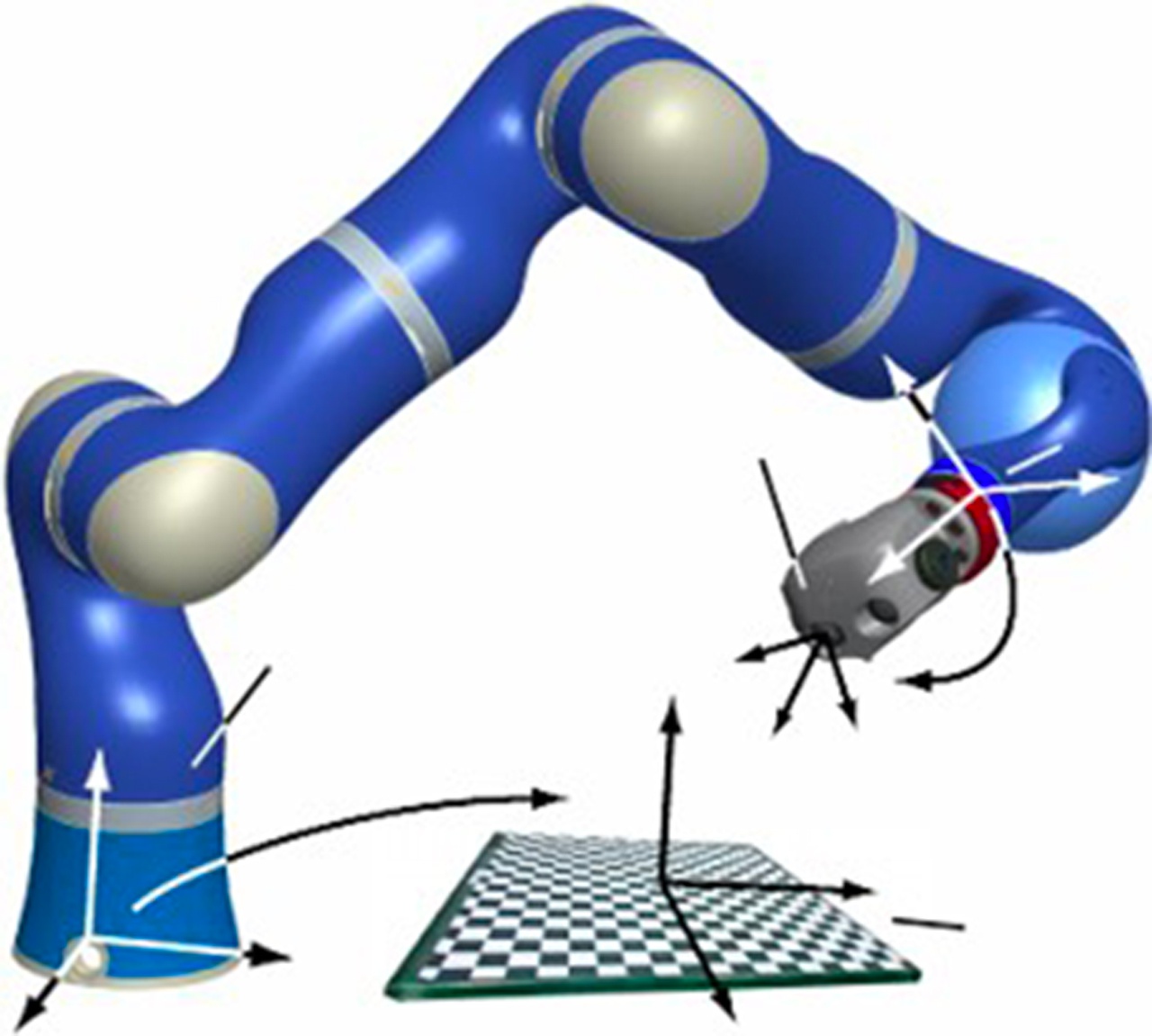
CALIBRAZIONE HAND-EYE COMPLETA
L’installazione del sistema e la calibrazione risulterà sorprendentemente semplice e veloce. Grazie alla calibrazione Hand-Eye è possibile infatti gestire in maniera completa l’intero range di movimento del sensore fissato sulla mano di presa del robot.